
V tomto článku si na příkladu senzoru otáček ukážeme, jak lze ukládat za letu telemetrická data a jak je lze následně zpracovat v tabulkovém procesoru (Microsoft Excel).
Umístění a zapojení senzoru
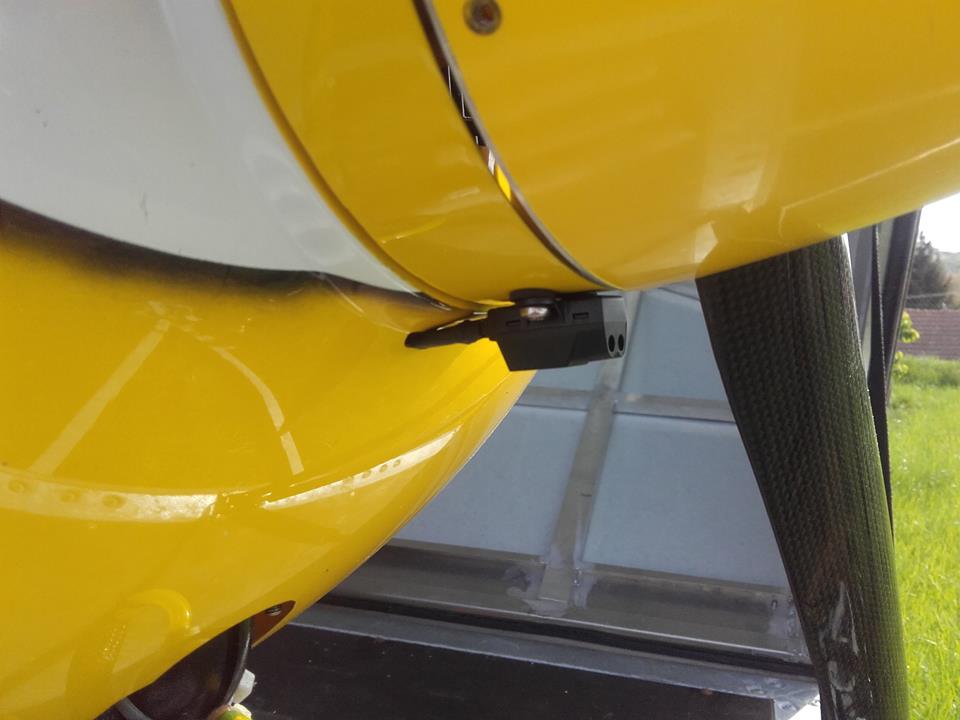
Pokud potřebujeme ověřit, zda se vybraná vrtule hodí pro náš model, motor a styl létání, určitě nás budou zajímat nejen otáčky vrtule na zemi, ale také za letu při odlehčení a při zatížení. K tomu se výborně hodí telemetrie ve Vašem vysílači Futaba. Jednoznačně jednodušší na instalaci je telemetrický senzor na optickém principu SBS-01RO, který instalujeme hned za vrtuli:
Senzor otáček pomocí prodlužovacího servokablíku zapojíme do zásuvky S.bus2 přijímače (pokud používáte 2 přijímače, tak do Rx1). Pokud používáte i jiné senzory, lze je jednoduše spojovat pomocí "Y" kabelů nebo HUB.
Pokud nemáte v modelu více senzorů stejného typu, není nutné senzor nijak registrovat a senzoru se automaticky přiřadí volný telemetrický slot. Zkontrolovat si to můžete na vysílači na obrazovce Linkage menu/Sensor. Na obrazovce Linkage menu/Telemetry/rpm sensor (po kliknutí na větší okénko otáček) musíme ještě nastavit počet listů vrtule (Blade).
Nastavení alarmů a spínače pro ukládání telemetrických dat
Při provozu modelu se spalovacím motorem je užitečné, pokud nás bude vysílač upozorňovat na zastavení motoru. Protože optický senzor registruje otáčky až od 360 1min-1 výše a volnoběžné otáčky běžného benzínového motoru se pohybují kolem 1000-1300 1min-1, nastavíme jako dolní limit např. 500 1min-1. Osobně horní limit nepoužívám, ale i ten lze nastavit. Nastavení limitních hodnot, zda má být alarm signalizován pípáním, hlasovým výstupem a vibracemi nastavíme na obrazovce Linkage menu/Telemetry/rpm sensor (po kliknutí na větší okénko otáček).

Pokud chceme během letu ukládat telemetrické údaje na SD kartu, musíme nastavit na obrazovce Linkage menu/Tele.setting interval pro ukládání dat (používám 5 sec.) a spínač, kterým budeme přepínat stav ukládám/neukládám.

Pro úplnost ještě uvádím, že rychlý přístup k okamžitým hodnotám telemetrie je na obrazovce "Telemetry", která je přístupná po stisknutí tlačítka HOME/EXIT na vysílači.
Zpracování telemetrických dat na SD kartě
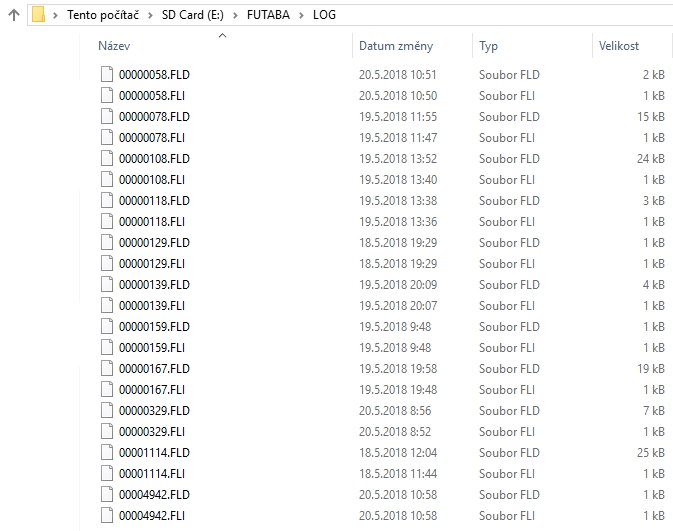
Po létání můžeme při vypnutém vysílači (!) vyjmout z vysílače SD kartu a zasunout ji do slotu pro SD kartu v počítači. V adresáři SD_Card/FUTABA/LOG nalezneme soubory s příponou FLD a FLI:
Abychom mohli telemetrická data číst a dále zpracovávat, musíme soubory převést do formátu *.csv, který umí přečíst tabulkový procesor (např. Microsoft Excel). K tomu budeme potřebovat instalovat na PC program Telemetry Log Converter, který si můžete stáhnout v aktuální verzi na stránkách Futaba Upgrades.
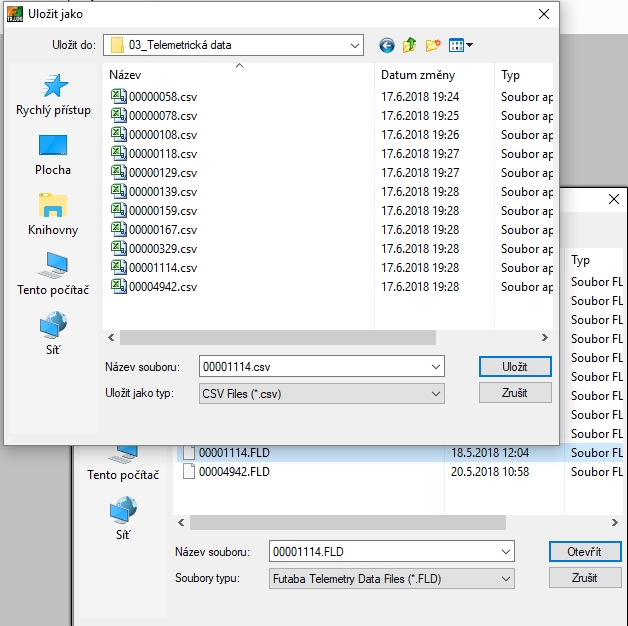
Po instalaci a spuštění programu Telemetry Log Converter vybereme soubor ke konverzi a umístění převedeného souboru *.csv:
Soubor *.csv otevřeme pomocí kliknutí pravým tlačítkem myši a "Otevřít v programu/Microsoft Excel".
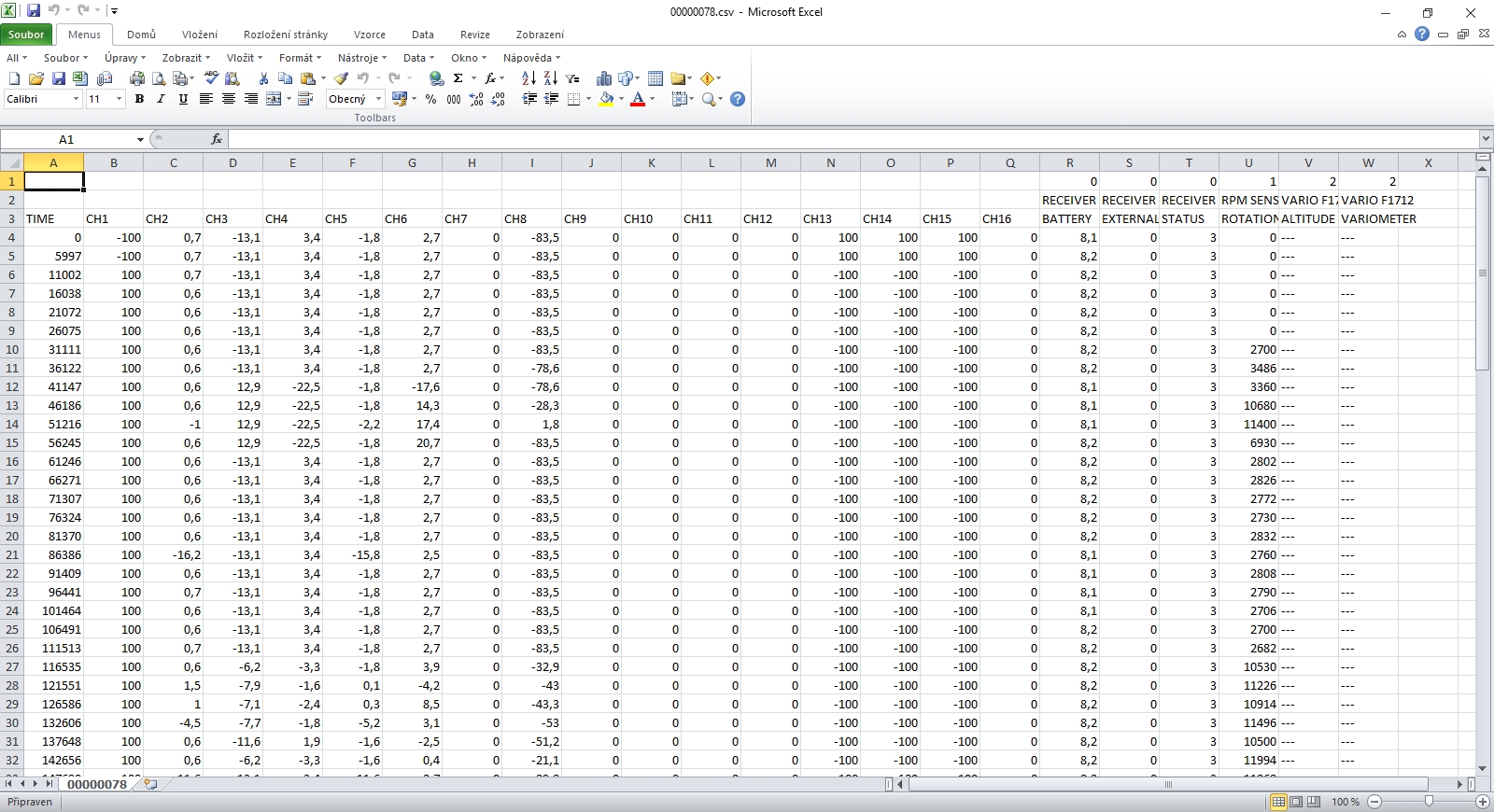
Ve sloupci TIME je čas s rozlišením na tisíciny sec., následují hodnoty výchylek 16-ti proporcionálních kanálů, velikost napájecího napětí přijímače a velikost externího napětí, připojeného do speciální zásuvky přijímače. Následují velmi důležité hodnoty RECEIVER STATUS. Status může nabývat hodnot 0 až 3 a znamená úroveň přijímaného signálu (3 = nejlepší příjem). Následují sloupce s daty přihlášených telemetrických senzorů. Celkem je k dispozici 31 telemetrických slotů, přičemž většina telemetrických snímačů využívá pouze jeden slot, jen GPS senzor jich potřebuje 8.
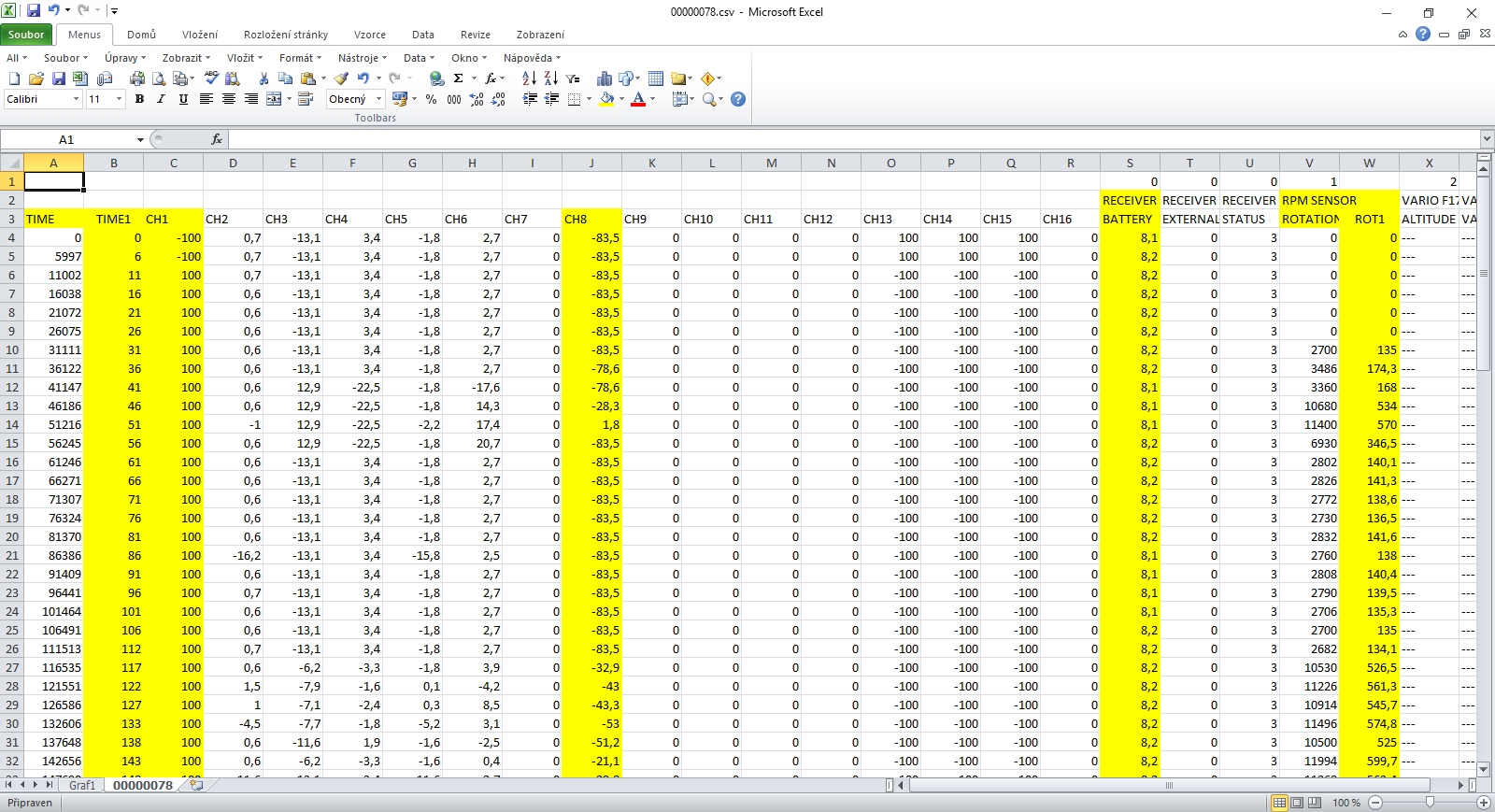
Pro zpracování dat v Excelu si můžeme přizpůsobit i měřítka. Ve sloupci TIME hodnoty podělíme 1000 a výsledek zaokrouhlíme na celé sekundy. Snímač otáček neukládá přepočítané otáčky v závislosti na počtu listů vrtule, ale pouze četnosti impulsů, proto data ve sloupci RPM SENSOR - ROTATION vydělíme 2 (dvoulistá vrtule) a z důvodu měřítka grafu ještě 10-ti. Upravená data jsou ve vložených sloupcích a žlutě jsou podbarvené sloupce, které nás zajímají: Čas, Kanál 1 - spínač zapalování, Kanál 8 - plyn, RECEIVER BATTERY (napětí přijímačových baterií ve Voltech), RPM SENSOR - přepočítané otáčky.
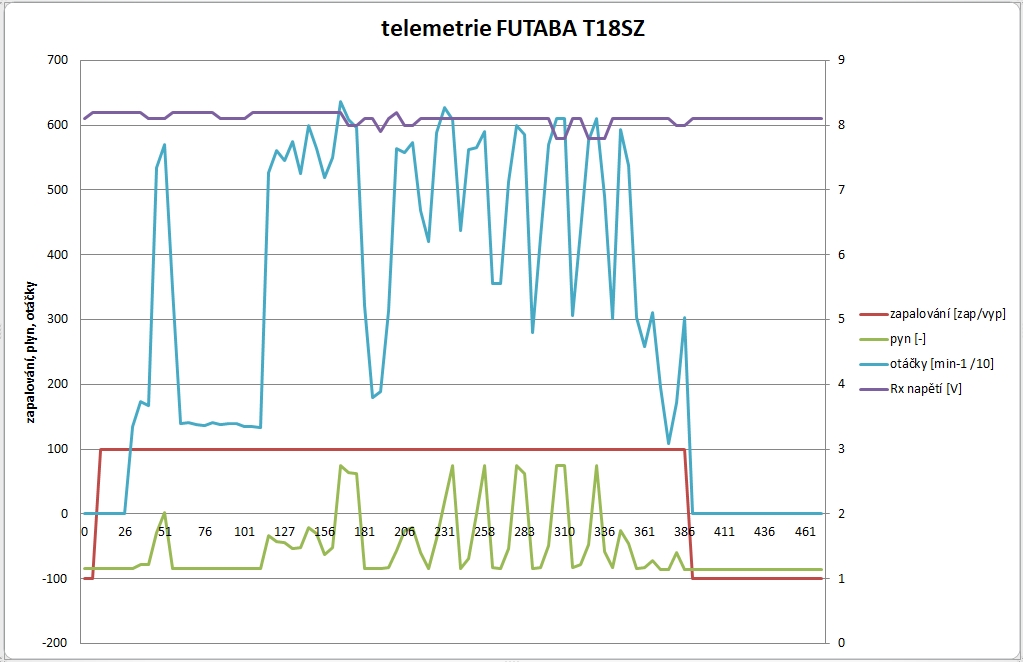
Z takto zpracovaných dat už můžeme sestavit graf - trend napětí Rx, otáček, polohy plynu a stavu zapalování. Z níže uvedeného grafu vidíme, že po sepnutí spínače pro ukládání telemetrických údajů SF bylo zanedlouho zapnuto zapalování motoru. Po nastartování motoru následuje krátké zahřátí motoru, kontrola volnoběhu a přechodů a na závěr vypnutí zapalování. Napětí baterek (2S LiIon) se po celou dobu drží kolem hodnoty 8V. Maximální otáčky na zemi byly 6369 1min-1.
Podobně lze zpracovávat údaje i z dalších telemetrických senzorů. V závislosti na účelu měření lze přizpůsobit četnost ukládání dat a další nastavení.